




La profonda trasformazione del mondo agricolo degli ultimi anni è guidata in primo luogo dalla sempre più spinta integrazione di tecnologie digitali avanzate e dall’automazione delle macchine operatrici. Infatti, le più comuni macchine, come trattori, mietitrebbie, insieme a numerose altre attrezzature non sono più semplici strumenti meccanici, ma sistemi complessi, dotati di un via via crescente grado di intelligenza, connettività e capacità decisionale.
È in questo scenario che l’adozione di soluzioni basate su sensori, intelligenza artificiale e sistemi di posizionamento rende le più comuni operazioni agricole più precise, efficienti e sostenibili, riuscendo, al contempo, a rispondere alla carenza di manodopera e alla necessità di ottimizzare le risorse. Sicuramente, tra le varie operazioni richieste a una macchina agricola efficiente, ci sono quelle di sapersi prima posizionare e poi navigare precisamente nello spazio con un via via crescente grado di autonomia. Per rispondere a queste necessità si sono fatti strada, in primo luogo, i sistemi di assistenza alla guida, affiancati, poi, dalle prime applicazioni di automazione avanzata.
I sistemi di assistenza alla guida (ADAS)
I sistemi avanzati di assistenza alla guida, meglio conosciuti come ADAS, hanno come base tecnologica su cui svilupparsi telecamere, radar, sensori di prossimità e di dispositivi di rilevamento ambientale. Questi sistemi, che sono già ampiamente diffusi nel settore dell’automotive, consentono di monitorare l’ambiente circostante, prevenire collisioni, ottimizzare le traiettorie e supportare l’operatore nell’operazioni critiche del lavoro in campo, dove la completa attenzione verso l’attività dell’attuatore utilizzato è spesso cruciale per la buona riuscita dell’operazione in sé, ma anche per garantire che non vengano fatti danni alla coltura principale.
Questo tipo di tecnologie sono fondamentali per rendere sempre più concreta la diffusione della guida completamente autonoma in agricoltura, dove le macchine potrebbero essere in grado di operare a livelli crescenti di indipendenza, 24 ore su 24, riducendo al minimo l’intervento umano, soprattutto per quelle operazioni ripetitive e che sottraggono tempo a operazioni più delicate per le quali è ancora necessaria la supervisione costante dell’operatore. In aggiunta a questi aspetti, la guida autonoma, grazie all’integrazione di sensori specifici, software di controllo e sistemi telematici, potrebbe permettere la raccolta e l’analisi continuativa di dati in tempo reale, così che le singole attività e la gestione complessiva dell’azienda posso essere efficientata il più possibile.
Il cuore tecnologico degli ADAS: la Sensor Fusion
Come accennato, la base degli ADAS agricoli risiede nell’integrazione di diverse tecnologie. Tuttavia, la vera sfida non è solo raccogliere dati, ma la “Sensor Fusion”: la capacità del software di incrociare informazioni diverse per eliminare i “falsi positivi”.
Radar vs Telecamere: mentre la telecamera può confondere un cumulo di polvere sollevato dal trattore con un ostacolo solido, il radar (operante a 77 GHz) attraversa la polvere e la nebbia, confermando o smentendo la presenza di un pericolo reale.
Sensori a ultrasuoni: nel contesto specifico dei vigneti, questi sensori diventano gli “occhi” di prossimità, essenziali per mantenere la distanza centimetrica dai tralci senza danneggiare la vegetazione, sopperendo alle zone d’ombra dei sensori a lungo raggio.
L’architettura di controllo: dal dato all’azione
Per comprendere come i sensori ADAS si traducano in una guida sicura, è utile osservare l’architettura logica del sistema di controllo (vedi Figura).
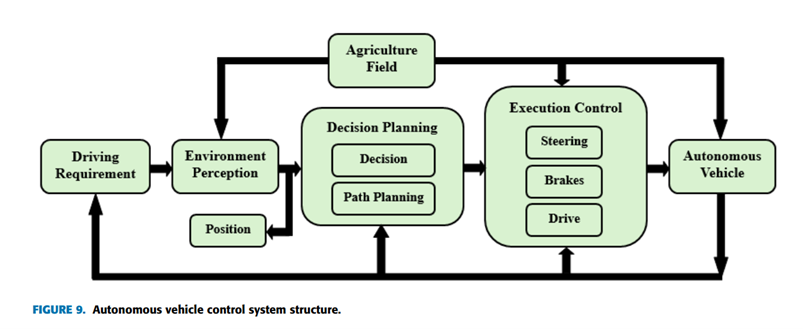
Il processo si articola in tre macro-fasi sequenziali che operano in un ciclo continuo (closed-loop):
- Environment Perception & Position: In questa fase, i dati grezzi di telecamere, radar e ultrasuoni vengono elaborati per definire la posizione del trattore rispetto al campo e individuare eventuali ostacoli. È qui che avviene la localizzazione relativa di cui abbiamo discusso (fondamentale in vigneti e frutteti).
- Decision Planning: Una volta “compreso” l’ambiente, il software decisionale pianifica la traiettoria ottimale (Path Planning). In un sistema ADAS, questo modulo decide se la rotta impostata dall’operatore è sicura o se deve intervenire per correggere la sterzata.
- Execution Control: È la fase operativa finale. Il sistema invia comandi diretti agli attuatori meccanici della macchina: Steering (sterzo), Brakes (freni) e Drive (trazione).
Questo schema evidenzia perché la precisione dei sensori sia così critica: un errore nella fase di Perception genera una decisione errata nel Planning, portando a un’esecuzione potenzialmente pericolosa in campo. È proprio per garantire l’integrità di questa catena logica che le attività di manutenzione e calibrazione assumono un ruolo centrale.
Maggiore attenzione ai lavoratori
I sopracitati sistemi ADAS hanno dato una grande spinta alla profonda trasformazione che sta vivendo il settore delle macchine agricole, soprattutto grazie alla riduzione del carico di lavoro degli operatori. Erano gli anni 90 quando approdarono le prime tecnologie di questo tipo nell’ automotive, come il cruise control basato su radar. L’integrazione di telecamere, radar multi-frequenza, sensori ultrasuoni hanno permesso di sviluppare varie funzionalità, tra cui il mantenimento della corsia, il riconoscimento dei segnali stradali, la frenata automatica di emergenza. A partire da queste funzionalità, l’adozione di architetture multi-sensore ha permesso di ottenere una capacità percettiva più completa e affidabile dell’ambiente circostante. È chiaro come le poche funzioni qui citate a titolo di esempio appaiono molto utili anche nel contesto agricolo, dove, a poco a poco questo patrimonio tecnologico è stata trasferito. È ormai chiaro come l’agricoltura presenti caratteristiche tali da renderla uno dei contesti ideali per l’automazione, soprattutto nel caso di alcune funzionalità come quella della navigazione: operazioni spesso ripetitive e operazioni svolte su lunghe finestre temporali.
Tutte queste caratteristiche hanno reso possibile già da anni l’adozione di forme di guida assistita basate su GNSS per l’esecuzione di lavorazioni che richiedono un alto grado di precisione. Negli ultimi anni, tuttavia, la richiesta non è più solo indirizzata al rispetto di traiettorie precise e predefinite, ma si richiede anche di interpretare l’ambiente circostante, così da adattare dinamicamente il comportamento della macchina. In questo contesto le tecnologie ADAS si inseriscono come passaggio intermedio fondamentale non solo per consentire una progressiva evoluzione verso macchine in grado di operare con livelli di autonomia sempre più elevati, ma anche per consentire agli operatori del settore di lavorare con un maggiore grado di sicurezza ed essere accompagnati in questo cambio di prospettiva.
L’incidenza delle condizioni ambientali
Come presupposto fondamentale per rendere realmente efficaci queste tecnologie c’è l’adozione delle cosiddette strategie di ridondanza, che consistono nel duplicare componenti fondamentali usati per lo stesso fine per garantire la continuità operativa e prevenire l’eventuale perdita di informazioni in situazioni critiche. Queste ultime in ambito agricolo sono spesso e volentieri legate a fattori ambientali che riducono le prestazioni dei sensori ADAS.
In particolare, dati provenienti dall’automotive quantificano l’abbassamento di queste prestazioni dando dei punteggi da 0 a 5:
0 – trascurabile: gli effetti delle condizioni meteorologiche possono essere praticamente ignorati
1 – minimo: gli effetti delle condizioni meteorologiche causano raramente errori di rilevamento
2 – lieve: gli effetti delle condizioni meteorologiche causano piccoli errori in casi limite
3 – moderato: gli effetti delle condizioni meteorologiche causano errori di percezione fino al 30% dei casi
4 – significativo: gli effetti delle condizioni meteorologiche causano errori di percezione nel 30–50% dei casi
5 – grave: gli effetti delle condizioni meteorologiche possono causare falsi positivi o falsi negativi
Andando nel dettaglio è possibile visualizzare le prestazioni dei singoli sensori nella seguente tabella che indica quanto specifiche condizioni ambientali possano incidere sulle prestazioni dei sensori ADAS.
Dove la situazione si complica
Ad oggi le applicazioni di guida autonoma o semi-autonoma sono consolidate soprattutto in campo aperto, caratterizzato da una relativa semplicità strutturale. I veicoli possono seguire percorsi pianificati con elevata precisione affidandosi unicamente a sistemi GNSS e mappe statiche accurate, perché non hanno un frequente bisogno di adattare in real time il loro comportamento. La situazione si complica in caso di colture specializzate caratterizzate da spazi di manovra ridotto, terreni irregolari e vegetazione in continua evoluzione; lo stesso discorso si può applicare anche alla gestione del verde paesaggistico dove non solo ci si trova davanti a un ambiente in continua evoluzione, ma anche a situazioni di terreno molto irregolare dove la sicurezza dell’operatore è messa a grave rischio; basti pensare alle operazione di sfalcio delle sponde fluviali, dove pendenza, irregolarità del suolo e sbilanciamento del mezzo rendono frequenti gli episodi di ribaltamento.
Per tornare al contesto prettamente agricolo, si può fare riferimento a quello vitivinicolo, dove la posizione del trattore o della piattaforma autonoma deve essere costantemente controllata rispetto ai filari, con una precisione centimetrica. In aggiunta, la presenza di vegetazione può interferire con il segnale GNSS e quindi ridurre l’affidabilità, la variabilità delle condizioni ambientali richiede la capacità di adattamento dinamico; in risposta a questo tipo di esigenze c’è la localizzazione relativa, basata sulla misura della distanza rispetto agli elementi circostanti.
Le tecnologie di sensing
Per acquisire le informazioni necessarie sull’ambiente circostante vengono impiegate un insieme ben coordinato di tecnologie di sensing. In primis ci sono le telecamere, soluzioni in assoluto più diffuse, grazie alla versatilità e al costo relativamente contenuto. Se da un lato questo sono fondamentali nell’impiego di algoritmi di visione artificiale per il riconoscimento della fila, della coltura, delle infestanti, dall’altra le condizioni di illuminazione, polvere o ombre può essere molto limitante.
Per affrontare queste limitazioni ambientali viene in soccorso la tecnologia radar, che offre un’elevata efficacia nel rilevamento degli ostacoli e nella stima della distanza, garantendo la sua efficacia anche in caso di condizioni ambientali come quelle descritte in precedenza.
Ci sono anche i sensori ultrasuoni, già ampiamente usati nell’automotive, molto utili nel rilevamento di prossimità, economici, ma non in grado di garantire una precisione tale rispetto ad altri sensori. Tra le più recenti tecnologie applicate in agricoltura e provenienti dal settore industriale ci sono i sistemi LiDAR, che forniscono una rappresentazione tridimensionale dell’ambiente, sono in grado di fornire info anche sullo stato della vegetazione, ma sono caratterizzati da costi ancora relativamente elevati che ne impediscono la diffusione.
Come risulta evidente, ogni tecnologia si presenza come soluzione utile e innovativa, ma con tutta una serie di limiti; per aggirare il problema si punta sempre di più alla “sensor fusion”, in modo tale da combinare dati provenienti da più sensori e ottenere affidabilità e robustezza in ambienti agricoli complessi, caratterizzati da un alto tasso di variabilità.
L’importanza della manutenzione
Parallelamente, in un contesto tecnologico in continua evoluzione, assumono un ruolo sempre più centrale le attività di manutenzione e la gestione corretta di questi sistemi avanzati. La calibrazione accurata dei sensori, insieme alle verifiche successive agli interventi e al rigoroso rispetto delle procedure tecniche, rappresenta una condizione imprescindibile per assicurare prestazioni affidabili e livelli elevati di sicurezza nei sistemi ADAS e nelle funzioni automatizzate. Inoltre, si sta consolidando un quadro normativo in costante aggiornamento, finalizzato a disciplinare l’utilizzo di queste tecnologie e a definirne criteri, standard e responsabilità.
Di Sofia Matilde luglio1, Mino Sportelli2
1Dipartimento di Scienze Agrarie, Alimentari e Agro-ambientali (DISAAa), Università di Pisa;
2Istituto di Scienze e Tecnologie dell’informazione A. Faedo (ISTI), Consiglio Nazionale delle Ricerche (CNR)
Estratto dell’articolo pubblicato completo sul numero di Marzo-Aprile 2026 de Il Giornale del Rivenditore Agricolo





